Biography
I have a PhD in Computer Science from Rice University. My thesis work, supervised by Lydia Kavraki and Anastasios Kyrillidis, revolved around motion planning algorithms for high-DOF robots under realistic environments. For my doctoral studies, I received a Fulbright Scholarship in 2019.
I am interested in understanding how to plan safe motions for robots in unstructured environments. My goal is to provide robots with the capabilities of autonomously deciding and acting in environments that may have noisy or incomplete information or where humans may be present. To this end, I have explored the use of optimization and learning-based methods into robot motion planning to enable safe and efficient robot motion.
Before joining Rice, I was an instructor and researcher at Universidad de los Andes and Universidad Santo Tomás where I thaught courses mainly in Electronic Engineering, Robotics and Machine Learning. During this time I had the chance to join the RoboCup community by becoming part of the STOx’s team of the Small Size League (2014-2017), serving as TC member in 2018 and by co-founding the SinfonIA team of the @Home Social Standard Platform League in 2019.
Download my resumé.
- Robotics
- Optimization
- Machine Learning
-
PhD in Computer Science, 2024
Rice University
-
MSc in Computer and Electronic Engineering, 2011
Universidad de los Andes
-
BSc in Electronic Engineering, 2009
Universidad de los Andes
News
[08/05/2024] I have successfully defended my PhD thesis Towards Robust Planning for High-DoF Robots in Human Environments: The Role of Optimization
[07/16/2024] Our extended abstract Perception-aware Planning for Robotics: Challenges and Opportunities has been accepted to be presented at ICRA@40 in Rotterdam, Netherlands!
[05/01/2024] Our paper Monitoring Constraints for Robotic Tutors in Nurse Education: A Motion Planning Perspective has been accepted for poster presentation at the WOrkshop on Nursing Robotics at ICRA 2024!
[01/29/2024] Our paper Stochastic Neural Implicit Representation for Safe Motion Planning was accepted at ICRA 2024 in Japan!
[11/06/2023] I am very excited to had been part of the series of special reports on advances in artificial intelligence prepared by Telemundo Houston for the hispanic audience in the United States. The series was broadcast in parts in Houston and rebroadcast nationally. The series parts can be found here:
- Ameca: el robot humanoide habla por primera vez en español
- La llegada de los autos sin conductor: ¿son seguros?
- La era de la Inteligencia Artificial: ¿Tenemos cabida en ella?
- Inteligencia artificial, la manera como está cambiando la forma de estudiar
[10/17/2023] Thrilled to be attending the 6th IEEE Colombian Conference on Automatic Control (CCAC) in Popayan, Colombia. Thanks to the organizers for inviting me to give a workshop on Robot Motion Planning for High-DoF robots using Trajectory Optimization.
[09/28/2023] Check out our latest pre-print on Stochastic Neural Implicit Representation for Safe Motion Planning.
[06/09/2023] Together with colleagues from Uniandes, I co-taught the summer course “Robot Learning”, where students had the chance to learn about robot perception, kinematics and motion planning. Check out the note (in spanish) about my involvement in this course.
[05/29/2023] Excited to be in London for ICRA 2023. I will be talking about our paper on how to improve TAMP planners using specialized convex optimization-based grounders in the presence of clutter and complex geometric constraints.
[03/01/2023] Our paper Optimal Grasps and Placements for Task and Motion Planning in Clutter has been accepted at ICRA 2023!
[12/05/2022] CS Rice wrote the note Robotics researchers develop open-source motion planning benchmarking tool about our work with my collegue Constantinos Chamzas on Benchmarking Motion Planning Algorithms
[10/31/2022] I gave my second COMP600 talk named “Human-Guided Motion Planning in Partially Observable Environments”
[10/23/2022] Check out our workshop on Evaluating Motion Planning Performance: Metrics, Tools, Datasets, and Experimental Design happening at IEEE/RSJ IROS 2022, Kyoto, Japan
[09/01/2022] I was selected to TA COMP450 - Algorithmic Robotics - taught by Dr. Kavraki for the Fall 2022
[06/15/2022] Check out the media article made by Rice University Humans in the loop robots find their way about our work on Human-Guided Motion Planning. IEEE Spectrum also picked it up!
[01/31/2022] Our paper Human-Guided Motion Planning in Partially Observable Environments has been accepted at ICRA 2022!
[11/18/2021] Our paper MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning Datasets has been accepted for publication in the IEEE Robotics and Automation Letters (RA-L)
[05/14/2021] Our paper Motion Planning via Bayesian Learning in the Dark has been accepted for spotlight presentation at the Machine Learning for Motion Planning (MLMP) workshop as part of ICRA 2021
[02/28/2021] Our paper Robust Optimization Motion Planning for high-DOF Robots under Sensing Uncertainty has been accepted at ICRA 2021!
[02/28/2021] Our paper Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High Dimensions has been accepted at ICRA 2021!
[12/10/2020] I was invited to give a talk at Seminario Internacional Sistemas Robóticos Autónomos y Aplicaciones
[12/09/2020] I was invited to give a talk at Uniandes
[10/19/2020] I gave my COMP600 presentation named “Optimization, Robots and Uncertainty”
[09/01/2020] I was selected to TA COMP450 - Algorithmic Robotics - for the Fall 2020
[01/01/2020] I joined the Kavraki Lab
[08/25/2019] I started as a PhD student in the Computer Science Department at Rice University
Projects
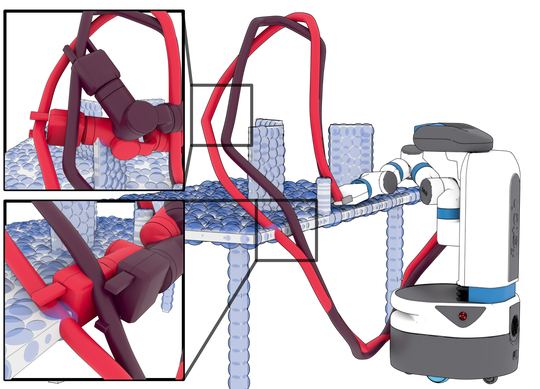
Stochastic Implicit Neural Signed Distance Functions for Safe Motion Planning under Sensing Uncertainty
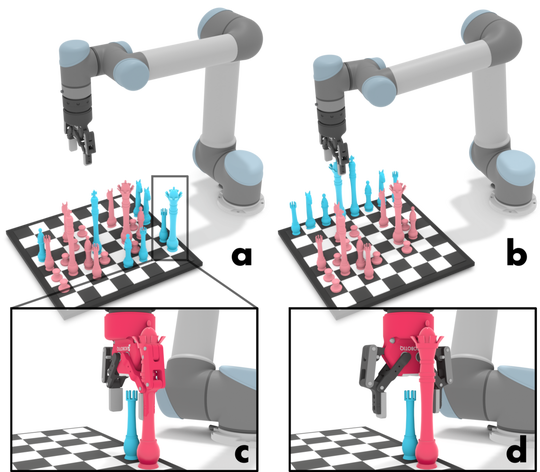
Optimal Grasps and Placements for Task and Motion Planning in Clutter
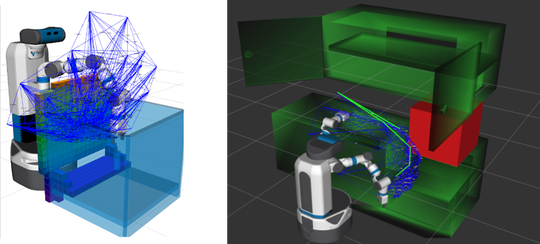
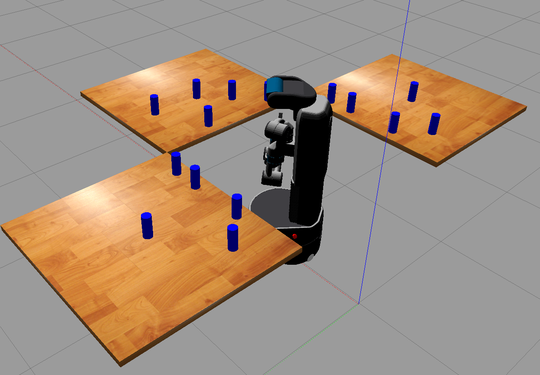
MotionBenchMaker A Tool to Generate and Benchmark Motion Planning Datasets
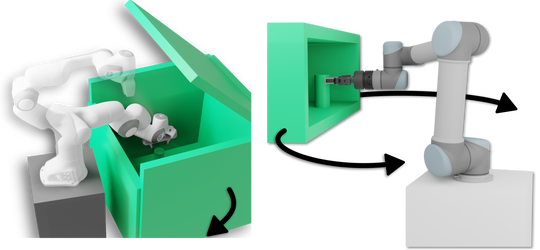
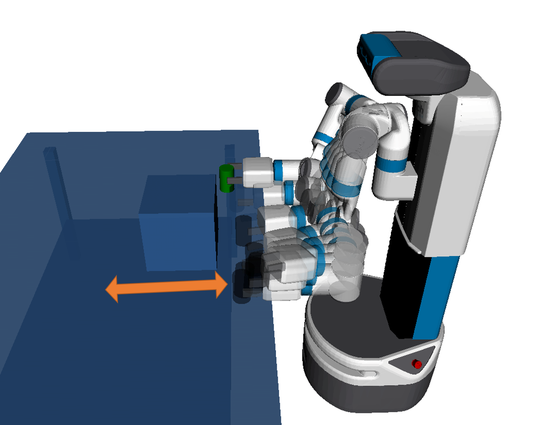
Human-Guided Motion Planning in Partially Observable Environments
Motion Planning with incomplete scene information
Robust Motion Planning under Sensing Uncertainty
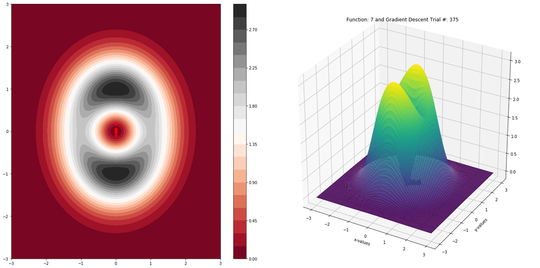
Can Theoretical Algorithms Efficiently Escape Saddle Points in Deep Learning?
Inverse Kinematics Robo Picasso

Contact
- carlosq [at] rice [dot] edu
- Duncan Hall, Rice University, Houston, TX 77005